Don't Care Conditions in K-Map
In digital logic design, simplifying Boolean expressions is essential to reduce the complexity of circuits. A Karnaugh Map (K-map) is a graphical tool used to minimize Boolean expressions systematically.
One important concept in K-maps is the Don't Care Condition, which allows us to further simplify the expression by treating certain cases as irrelevant.
What is a Don't Care Condition?
A Don't Care Condition occurs in situations where the output for certain input combinations is not required or doesn’t affect the overall function.
This can happen in real-world systems where certain inputs are invalid, unused, or where the output doesn't matter for specific combinations.
In a K-map, these conditions are typically represented by the symbol "X".
When simplifying a Boolean expression using a K-map, we are free to assign a Don't Care cell a value of either '0' or '1', depending on which helps to group more cells and simplify the Boolean function.
Why Do Don't Care Conditions Matter?
Don't Care conditions allow for greater flexibility when grouping cells in a K-map.
By strategically treating certain cells as either '0' or '1', we can create larger groups of adjacent cells, reducing the final Boolean expression to a simpler form.
This reduces the number of logic gates required in the final circuit, improving efficiency.
Example of Don't Care Condition in K-Map
Let's walk through a detailed example to understand how Don't Care conditions work.
Boolean Function and Truth Table
Consider a 3-variable Boolean function F(A, B, C) with the following truth table:
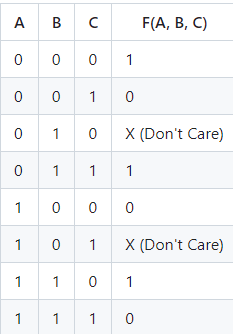
In this example
- The input combinations (A=0, B=1, C=0) and (A=1, B=0, C=1) are marked as "Don't Care" conditions, denoted by 'X'.
- The other inputs either produce a '1' (TRUE) or '0' (FALSE) output.
Step-by-Step Explanation Using K-Map
Step 1: Set Up the K-Map Grid
We create a 3-variable K-map for the function F(A, B, C), where the rows and columns represent different binary combinations of the variables A, B, and C.

Each cell represents a minterm (a specific combination of A, B, and C). For example, the top-left cell represents A=0, B=0, C=0.
Step 2: Fill in the K-Map Values
Next, we transfer the values from the truth table to the K-map:
- '1' in positions (A=0, B=0, C=0), (A=0, B=1, C=1), and (A=1, B=1, C=0).
- '0' in positions (A=0, B=0, C=1) and (A=1, B=1, C=1).
- "Don't Care" (X) in positions (A=0, B=1, C=0) and (A=1, B=0, C=1).
Step 3: Group the 1s and Don't Cares
The goal of K-map simplification is to form groups of adjacent 1s, covering as many cells as possible. Groups can be formed in powers of two (1, 2, 4, or 8 cells). Don't Care conditions (X) can be treated as either '1' or '0' to help create larger groups.
- We can combine (A=0, B=0, C=0) and (A=0, B=1, C=1) because the Don't Care condition at (A=0, B=1, C=0) allows us to form a larger group, simplifying the expression.
- Similarly, we can group (A=1, B=1, C=0) with the Don't Care condition at (A=1, B=0, C=1) to form another group.
Step 4: Derive the Simplified Boolean Expression
After grouping the cells, the resulting simplified Boolean expression can be written by identifying the common variables in each group:
- For the group covering (A=0, B=0, C=0) and the adjacent cells: This corresponds to A'B'.
- For the group covering (A=1, B=1, C=0) and the adjacent cells: This corresponds to AB.
Thus, the final simplified Boolean expression is:
[ F(A, B, C) = A'B' + AB ]
Step 5: Final Verification
The simplified expression can now be used to design a more efficient digital circuit, requiring fewer gates than the original expression. The inclusion of Don't Care conditions allowed us to reduce the number of terms, making the design more efficient.
Conclusion
- Don't Care Conditions are used in K-maps when certain input combinations do not matter for the function's output.
- These conditions are represented by 'X' and can be treated as either '0' or '1' to simplify Boolean expressions.
- The flexibility provided by Don't Care conditions allows for larger groupings in K-maps, reducing the final expression and simplifying the digital logic design.
By following the step-by-step process of plotting values, grouping cells, and deriving simplified expressions, we can create optimized digital circuits using Don't Care conditions in K-maps.